
System automatycznego zbierania danych o pojazdach samochodowych z wykorzystaniem analizy obrazów stereoskopowych
Celem projektu było opracowanie i konstrukcja modelu systemu nadzoru wizyjnego nowej generacji przeznaczonego do automatycznego pomiaru rozmiarów poruszających się pojazdów. W projekcie opracowano oraz wykorzystano nowatorską w skali światowej koncepcję przetwarzania ruchomych obrazów stereoskopowych w celu wyznaczania fizycznych rozmiarów poruszających się pojazdów oraz klasyfikacji tych pojazdów.
Projekt ma duże znaczenie naukowe. Według wiedzy autorów zbudowany został model pierwszego na świecie stereoskopowego systemu do pomiaru rozmiarów samochodów.
Najważniejsze wyniki projektu:
Opracowany model mobilnego (ruchomego) systemu akwizycji obrazów stereoskopowych, który może być wykorzystany zarówno w środowisku miejskim jak i na autostradach i drogach ekspresowych. System został opracowany z myślą o integracji z istniejącym systemem monitoringu miejskiego.
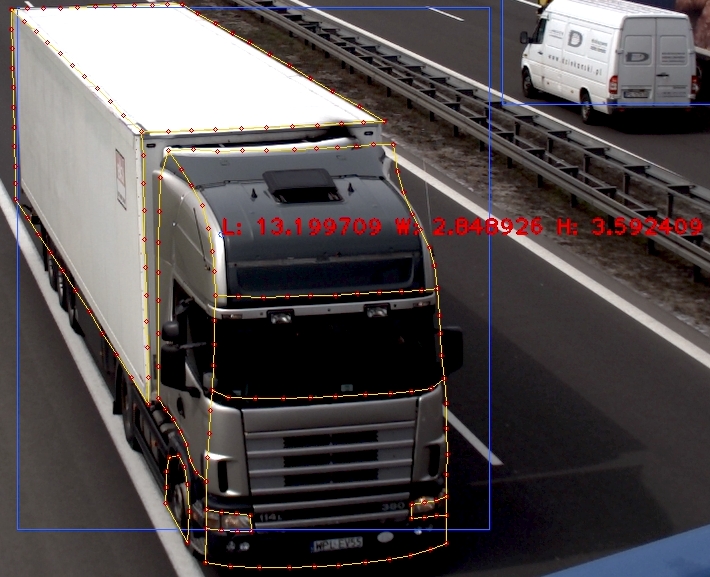
Autorska technika pomiaru fizycznych rozmiarów pojazdów. System umożliwia w pełni automatyczny zdalny pomiar wysokości, szerokości, i długości pojazdu w metrach z wysoką dokładnością. System działa w pełni pasywnie.
Autorska technika klasyfikacji typów pojazdów w oparciu o wymiary geometryczne. Możliwe jest ustawienie alarmów, które sygnalizują wykrycie pojazdu pewnego typu lub pojazdu ponadgabarytowego. Przykładowo można wykrywać samochód ciężarowy na drodze z zakazem ruchu pojazdów ciężarowych albo wysoki autobus zbliżający się do niskiego mostu.
Model systemu integrujący opracowane algorytmy i techniki w spójny system pomiaru i klasyfikacji pojazdów, będący podstawą do wdrożenia.
Autorski model matematyczny pozwalający na oszacowanie dokładności pomiaru wymiarów geometrycznych pojazdów na podstawie warunków akwizycji i ustawienia sceny. Opracowany model pozwala na optymalizację ustawienia systemu akwizycji w konkretnym przypadku w celu minimalizacji błędu pomiaru.
Przewiduje się cztery scenariusze bezpośredniego wykorzystania rezultatów projektu:
Zastąpienie obserwatorów, automatycznym systemem zliczającym pojazdy podczas badań natężenia ruchu. Standardowo w takich badaniach uczestniczą obserwatorzy, którzy na specjalnych formularzach zaznaczają liczbę pojazdów poszczególnych typów. Automatyzacja procesu pozwoli na obniżenie kosztów pomiarów, zwiększenie czasu trwania pomiarów i poprawę obiektywności, a także na pomiary ruchu z uwzględnieniem większej liczby kategorii pojazdów.
Permanentna analiza natężenia ruchu poszczególnych typów pojazdów (bez naruszania zasad ochrony danych osobowych) – zadanie niemożliwe do wykonania klasycznymi metodami, np. stosowane powszechnie czujniki indukcyjne pozwalają jedynie na zgrubny/ogólny podział pojazdów na kategorie.
Permanentny nadzór i automatyczna sygnalizacja naruszania zakazów wjazdów przez pojazdy pewnych typów (np. ponadgabarytowe pojazdy ciężarowe) – zadanie niemożliwe do wykonania klasycznymi metodami. Przykład zastosowania: System wysyła do straży miejskiej lub policji zdjęcie z czytelnym numerem rejestracyjnym pojazdu naruszającego zakaz. Może również zainicjować ciągłe przekazywanie obrazu ruchomego tego pojazdu.
Określenie kategorii pojazdu, gdy wprawdzie dopuszczalne jest wykorzystanie informacji z tablic rejestracyjnych, ale jest to trudne ze względu na złe oświetlenie, zabrudzenie i zasłonięcie tablic itp. Uzyskanie informacji o typie pojazdu z tablic rejestracyjnych wymaga czasu i dostępu do danych wrażliwych. Opracowany system potrafi określić typ pojazdu, a w przypadku jego nieznajomości dokładne gabaryty pojazdu.
Prace badawcze prowadzono w taki sposób, aby wyniki miały charakter uniwersalny i mogły być wykorzystane także w innych zastosowaniach, np. także do wymiarowania oraz klasyfikacji obiektów innych typów.
Przygotowane oprogramowanie modelowe stanowi podstawę do przyszłych prac rozwojowych i wdrożeniowych, dzięki którym na podstawie opracowanego modelu możliwe będzie przygotowanie całej gamy produktów. Ich wybór należeć będzie do jednostek gospodarczych wykorzystujących wyniki.
Wykaz publikacji i promocji wyników projektu
Publikacje w czasopismach recenzowanych:
-
Robert Ratajczak, Tomasz Grajek, Krzysztof Wegner, Krzysztof Klimaszewski, Maciej Kurc, Marek Domański,
„Vehicle Size Estimation for Stereoscopic Video Surveillance Systems",
w przygotowaniu
Artykuły w recenzowanych materiałach ważnych konferencji międzynarodowych dostępne także w IEEE Xplore Digital Library:
-
Robert Ratajczak, Marek Domański, Krzysztof Wegner,
„Vehicle Size Estimation from Stereoscopic Video",
International Conference on Systems, Signals and Image Processing, IWSSIP 2012, 11-13. April 2012, Vienna, Austria, pp. 405-408.
-
Tomasz Grajek, Robert Ratajczak, Krzysztof Wegner, Marek Domański,
„Limitations of Vehicle Length Estimation Using Stereoscopic Video Analysis",
20th International Conference on Systems, Signals and Image Processing, IWSSIP 2013, 7-9 July 2013, Bucharest, Romania, pp. 27-30.
-
Robert Ratajczak, Tomasz Grajek, Krzysztof Wegner, Krzysztof Klimaszewski, Maciej Kurc, Marek Domański,
„Vehicle Size Estimation Scheme Using AAM on Stereoscopic Video",
10th IEEE International Conference on Advanced Video and Signal-Based Surveillance (AVSS), 27-30 August 2013, Kraków, Poland, pp. 478-482.
artykuł zaproszony w ramach Workshop on Vehicle Retrieval in Surveillance (VRS) 2013,
koordynator zapraszający: Lisa Brown, IBM T.J. Watson Research Center, New York.
Inne formy prezentacji wyników:
Prezentacja (stoisko) na 9 Targach Techniki Przemysłowej, Nauki i Innowacji TECHNICON-INNOWACJE 2013, 24-25 października 2013 w Centrum Wystawienniczo-Kongresowym AmberExpo w Gdańsku.
Ulotki rozdawane na targach i wystawach (np. International Broadcasting Convention - IBC 2013 w Amsterdamie).


Wykonawcy:
Politechnika Poznańska, Katedra Telekomunikacji Multimedialnej i Mikroelektroniki
Zylia sp. z o.o.